|
| © Johns Hopkins University Applied Physics Laboratory |
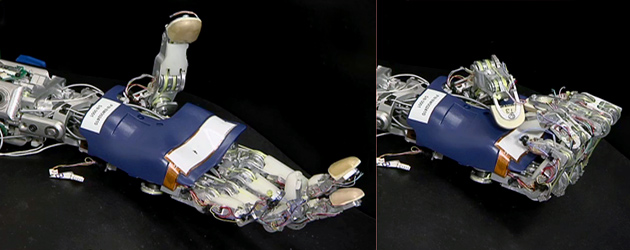
| The device pictured above is the second prototype in the U.S. military's ambitious prosthetics project to build a bionic arm. |
Kuniholm and his fellow engineers at Johns Hopkins University's Applied Physics Laboratory, or APL, are at work on the most ambitious prosthetics project in history. They seek the field's holy grail -- to build an artificial human arm that acts, looks and feels to its user like his native arm, and to do it with astonishing speed by the end of 2009.
To get there from here, they'll have to achieve major breakthroughs in neurological control systems and robotics. But they have a more immediate task, which is to assemble the next prototype, called Proto 2, in time for Kuniholm to show it off this week at the 25th Darpa Systems and Technology Symposium in Anaheim, California.
Darpa has called on engineers at 28 companies and research institutions in six countries to help. It all comes together in this workshop, where the APL engineers seek to integrate pattern-recognition software, custom-built computer chips, electric motors and other actuation systems into a seamless whole that a user can don in the morning and use to accomplish daily tasks like tying his shoes, typing, throwing a ball, even playing a piano, with hardly a thought.
Darpa program managers launched Revolutionizing Prosthetics 2009 two years ago to help soldiers like Kuniholm who were returning from combat in Iraq or Afghanistan missing all or part of an arm. Most of the amputees, Kuniholm included, have elected to use simple, body-operated hooks whose basic technologies date back to World War I instead of the current generation of myoelectric arms that read muscle signals from electrodes on the skin. The higher-tech arms are slower, heavier and more difficult to operate than hooks, whose design has changed little in almost 100 years.
Hedging its bets, Darpa is also funding the less-ambitious Revolutionizing Prosthetics 2007 project. That effort, intended to produce the best prosthetic arm possible with currently available technology, is headed by Deka Research and Development, the Manchester, New Hampshire, company run by Segway inventor Dean Kamen. Deka aims to unveil its completed arm by the end of this year, while APL will push past this year's prototypes in an attempt to advance the state of the art.
For now, both Deka and APL are based on cutting-edge myoelectric control systems pioneered by Todd Kuiken at the Rehabilitation Institute of Chicago, or RIC. Conventional myoelectric controls use electrodes on the surface of the skin to read muscle signals from some part of a user's body unaffected by his amputation -- his back for example -- and pass the signal on to an artificial limb. The user twitches her back, and the limb moves in response.
But moving one's back muscles to operate an arm is counterintuitive, so in 2002 Kuiken improved on this system by surgically rerouting nerves from the arm stump of amputee Jesse Sullivan to muscles in his chest. Sullivan's re-enervated chest muscles now twitch in response to his attempts to move his missing arm, and surface electrodes pick up that muscle activity to use as a control signal. Kuiken has also had success in rerouting sensory nerves to give artificial limbs some degree of tactile feedback to their wearers.



Reader Comments
to our Newsletter